We congratulate the winners CSIRO, V&R and MARS LAB for their outstanding performance. Additionally we congratulate TUM for winning the vision only award.
The cash award winners are
- Wei Xu, Zheng Liu, Chongjian Yuan, Xiyuan Liu, and Fu Zhang (MARS LAB): 7000 USD
- Hyungtae Lim, Daebeom Kim, Beomsoo Kim, Seungwon Song1, Alex Junho Lee, Seungjae Lee, and Hyun Myung (KAIST): 3000 USD
- Jiahe Cui, Yunxiang He, Shuyao Shi, and Jinwen Zhu (Beihang Univ, The Chinese University of Hong Kong): 2000 USD
- Wei Zhang and Sen Wang (University of Stuttgart, TUM): 1000 USD
Live Leaderboard 2022
Live Vision/imu only leaderboard
Score Computation
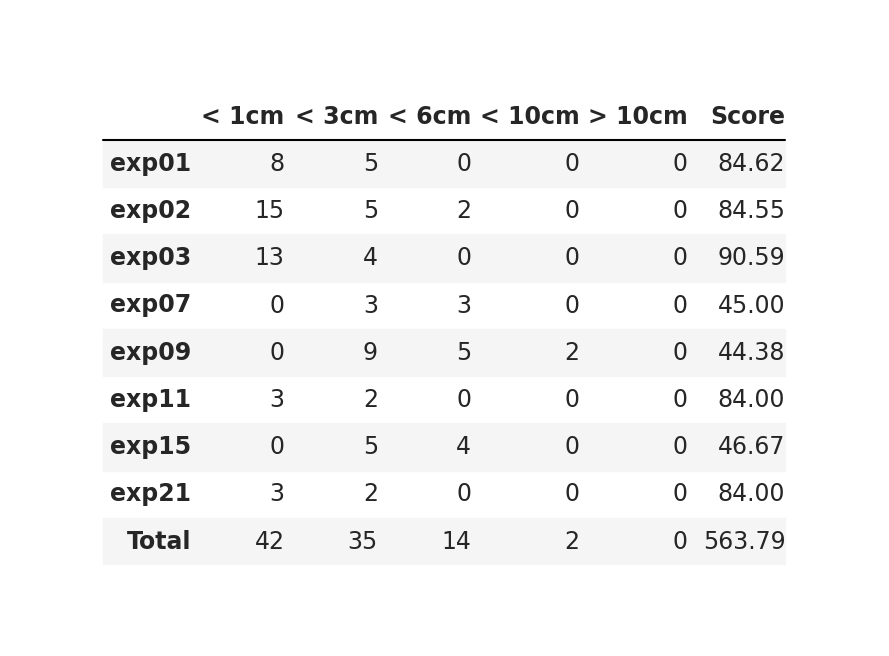
After transformation of the estimates from the imu frame to the pole tip, we aligned the trajectory with the sparse ground truth points using a rigid transformation. Then the ATE for each point is computed (we rely on the evo script). Depending on the error, each ground truth point adds a certain amount of points to the score:
- < 1cm → 10 points
- < 3cm → 6 points
- < 6cm → 3 points
- < 10cm → 1 point
- >10cm → 0 points